24-Sep-2013
Here is my breadboard version of Andrew Holme's Homemade GPS Receiver.
I used a BeagleBone Black (USD$55) running
the preloaded
Angstrom Linux.
A breadboard "cape"
plugs into the BBB expansion connectors to which I attached an XESS
XuLA2 FPGA development board (USD$119) based on the
Xilinx Spartan-6 LX25.
A one-bit wide SPI interface connects the BBB and the FPGA. The GPS front-end is built using a Skyworks SE4150 single chip solution sampling at 16.368 MHz with an IF of 4.092 MHz. Only the I-sign data is used. A 12-channel receiver configuration occupies 34% (1271/3758) of the LX25 logic slices. This includes the custom 32-bit embedded processor designed by Andrew for handling the sequential parts of the tracking loops that update at 1 KHz.
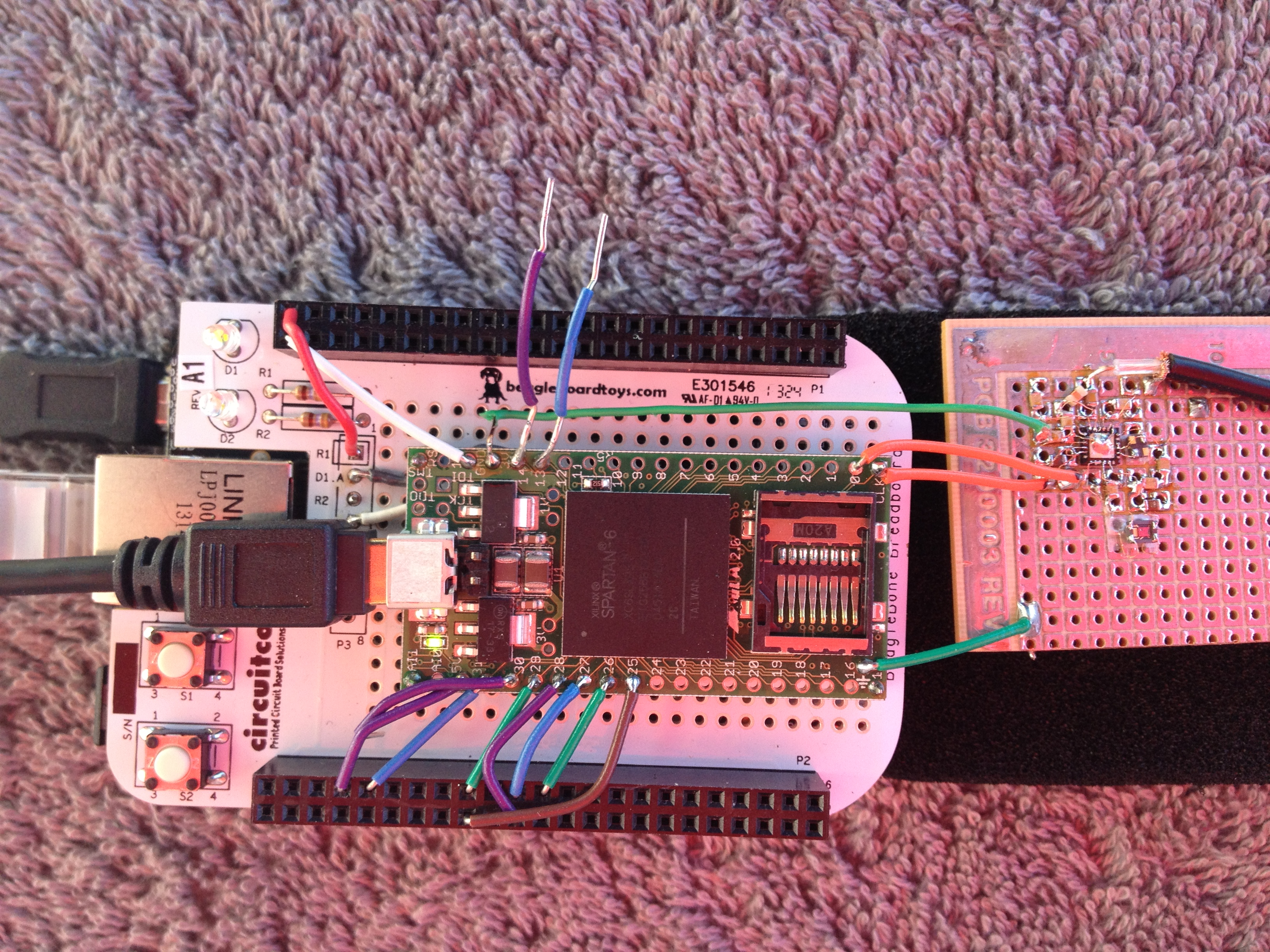
In the image below the white breadboard cape obscures the BBB underneath.
It attaches via the two black headers at top and bottom. The SPI from the FPGA is wired to the bottom header.
At the moment USB from the laptop is used to download the FPGA bitstream. Eventually the BBB will download via JTAG since it shares the SPI wiring.
Just four wires connect the GPS front-end at right: 3.3V, gnd, clock and I-data. A 3.3V active antenna is hardwired to the board.
Click image for larger.
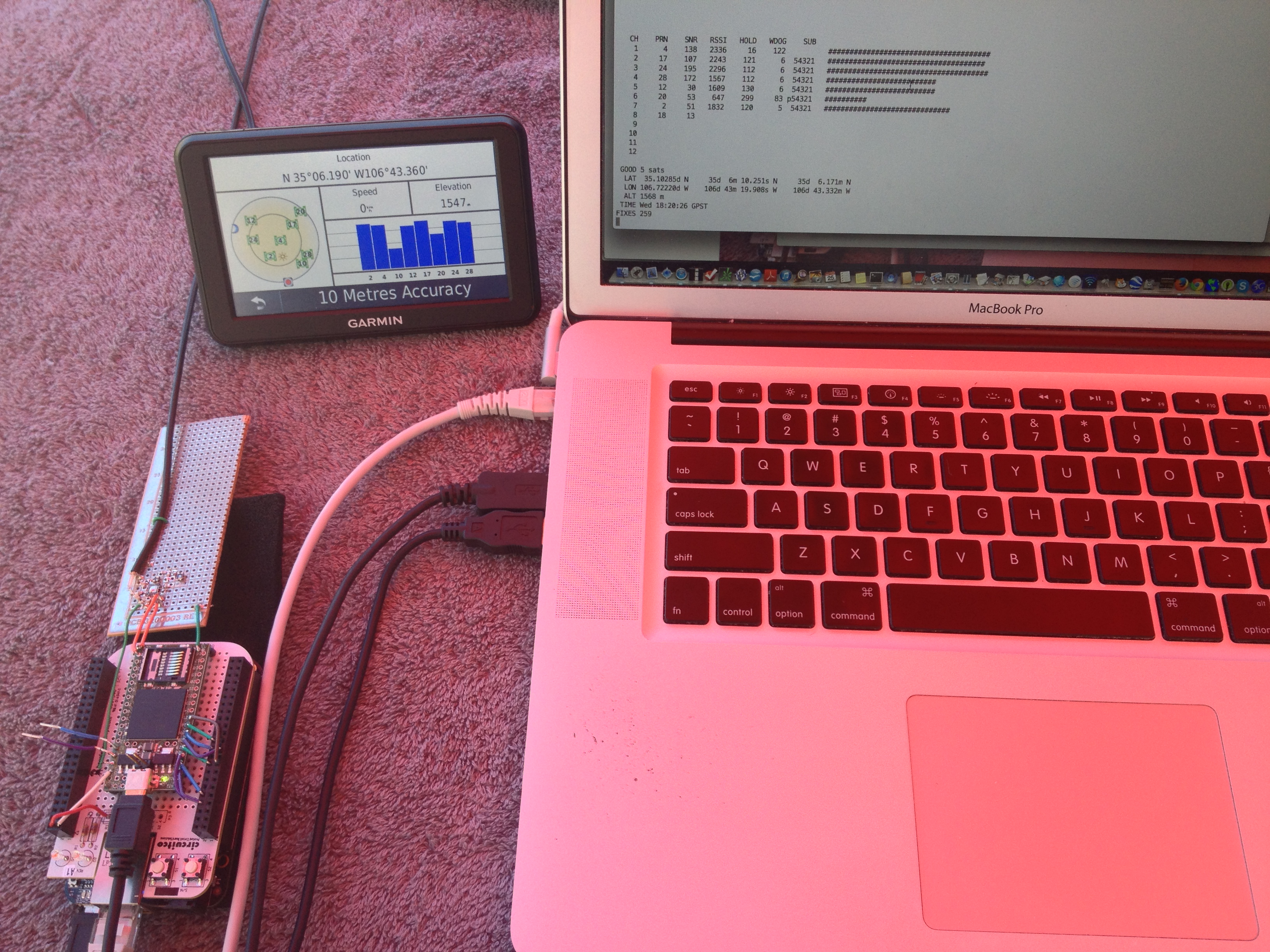
The image below shows the running system. The laptop is strictly a display/keyboard connection to the BBB. No part of the SD-GPS software runs there. If you zoom in you'll note the SD-GPS position agrees, more or less, with the Garmin in the background.
The various status and statistics collected are:
SNR - the SNR from the initial FFT code/doppler search. > 30 needed to attempt tracking.
RSSI - the received signal strength during tracking. Also shown as #-marked graph at right.
HOLD - number of NAV bits currently detected and held. 300 needed for each subframe.
WDOG - watchdog ticks since last subframe detected. > 240 causes channel drop.
SUB - shows the detection status of each of the 5 subframes. ('p' means parity error)
FIXES - number of successful fixes computed since startup.
Click image for larger.
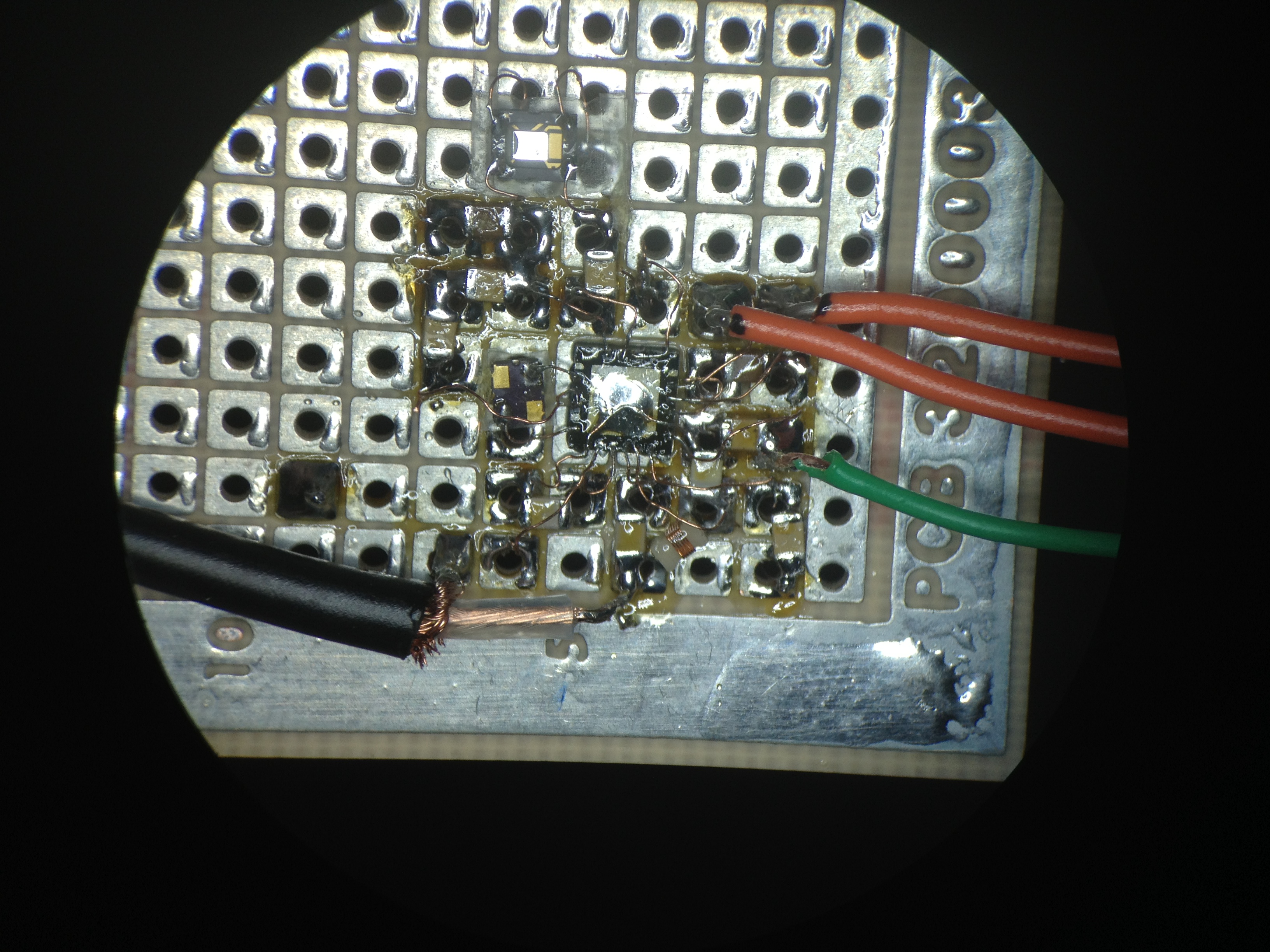
You haven't really lived until you've dead-bugged a 4 x 4 mm QFN package with 0.5 mm pitch pads using 40 AWG wire. It would be impossible without a good quality microscope, great tools and the ability to hold your breath while soldering a connection. I used an ordinary pad-per-hole 0.1 inch spacing breadboard that's really made for old-fashioned through-hole parts. There is a ground plane on the bottom side. In the image the TCXO is at top, the SAW filter middle-left and the SE4150 in the middle with a pool of solder on the ground paddle. Cellophane tape was used to secure the dead-bug parts so the surface tension force from soldering doesn't move them (this works surprisingly well).
So, despite the awful grounding, little 40 gauge wire inductors everywhere, no quiet local voltage regulator
and every package connection done on a wing-and-a-prayer this little breadboard of a GPS front-end chip worked the first time!
The sensitivity is not bad but signals are noisy (sats track okay, but extracting the NAV messages is marginal).
Click image for larger.
I am indebted to Andrew for publishing his homemade GPS receiver project in such detail.
I had not really understood the subtleties of GPS signal processing until now.